Spider Robot to Help Untangle Cucumber Disease
An NC State engineer and plant pathologist work together to create robotics to get ahead of cucurbit downy mildew, a devastating cucumber disease.
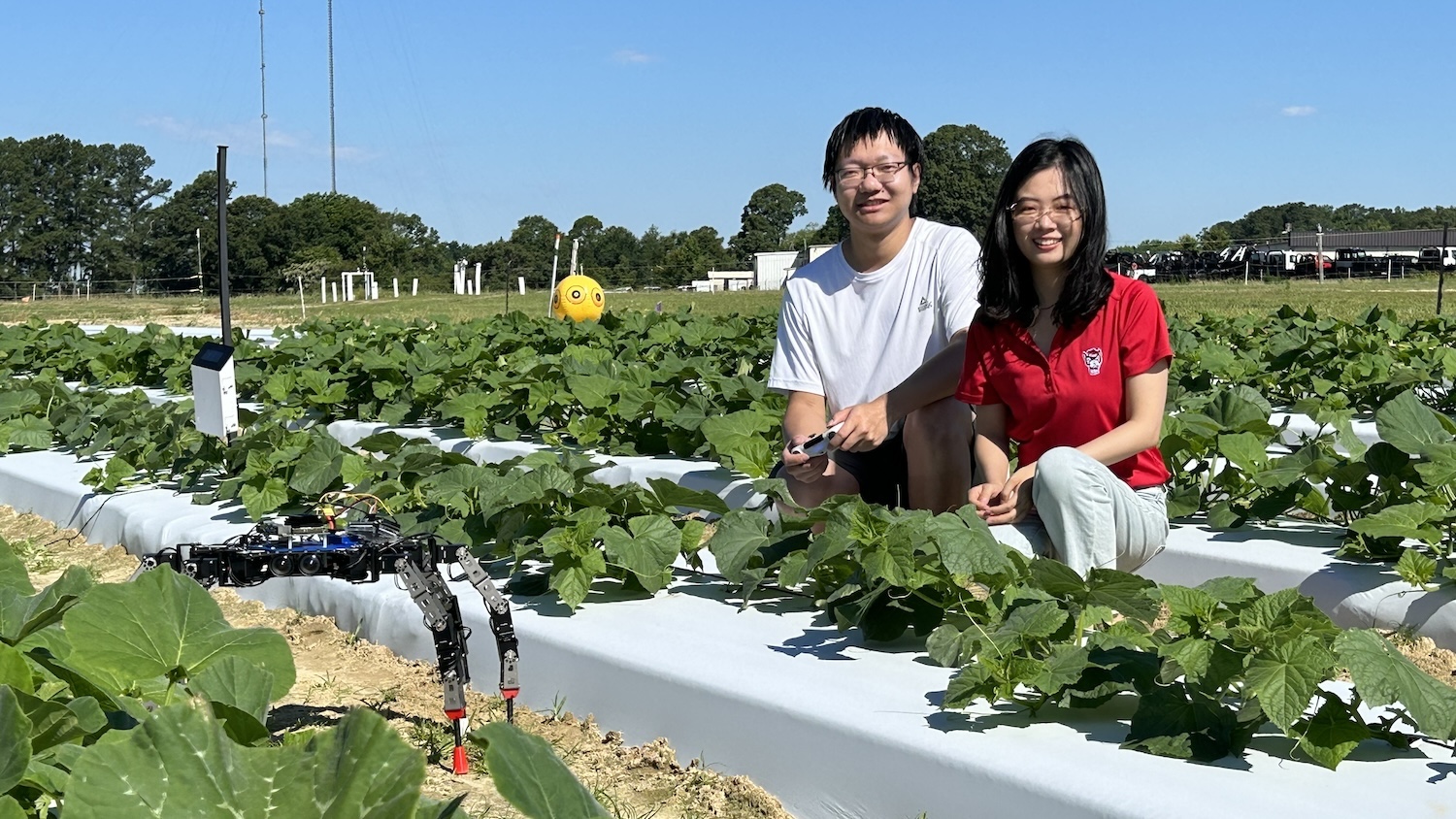
Under the control of NC State University biological and agricultural engineering graduate student Zhenghua Zhang, a six-legged, spider-like robot skitters across cucumber rows at the Central Crops Research Station in Clayton.
His faculty mentor, Lirong Xiang, and plant pathologist Lina Quesada-Ocampo are counting on the robot to help get farmers out of the pickle they’re in when it comes to combating the worst disease affecting the U.S. crop and its cousins.
For nearly two years, the N.C. Plant Sciences Initiative-affiliated researchers have worked together to come up with ways to help growers better manage cucurbit downy mildew. This summer, they hope to test the robot, which was built in Xiang’s lab, on farmers’ fields. That wil give them a better idea of whether it will indeed be something growers can use to get ahead of the disease.
An Old Pest Poses New Challenges

Present in the United States since the late 1800s, cucurbit downy mildew causes leaf lesions that can lower yields and even kill plants of the gourd family, including cucumbers, cantaloupes, watermelons, squash and pumpkins.
Growers had long avoided the disease by planting resistant crop varieties. But in 2004, that changed. In an epidemic that was first noticed in North Carolina, the disease devastated once-resistant cucumber varieties, leaving some farmers to abandon their fields rather than harvest them.
Our goal is to help growers know precisely when to spray and what to spray.
As Quesada-Ocampo explains, inexpensive broad-spectrum fungicides didn’t work against the disease, so growers had to turn to expensive chemicals to stop their losses.
Not only that, farmers weren’t always sure which of these sprays would work against the fungus-like pathogen that causes the disease.
“The growers have this kind of catch-22, where they need to start spraying before the disease comes so that the fungicide is most effective, but they don’t want to do it too early, because then it becomes financially difficult for them to be able to afford all those sprays,” says Quesada-Ocampo, a William Neal Reynolds Distinguished Professor in NC State’s Department of Entomology and Plant Pathology.
“Not only that, the pathogen, which is called Pseudoperonospora cubensis, can develop resistance very quickly,” she adds. “So sometimes growers will be applying these various expensive sprays, and they’re not working. It’s like a double whammy. Our goal is to help growers know precisely when to spray and what to spray.”
Devising a Practical Solution
When Quesada-Ocampo began thinking of ways to get to that goal, she and her Ph.D. student Mariana Prieto had a couple of important tools at their disposal: diagnostic tests that could help them understand more about the resistance of disease-causing spores to certain chemicals, plus stationary traps that could capture airborne spores in fields before plants show symptoms.

The problem was that while the traps worked fine in a one-acre test plot, commercial growers didn’t think they’d be practical on their larger farms. Checking and changing hundreds of traps spread throughout their fields every week would be too labor-intensive for an industry already facing labor shortages, they told Quesada-Ocampo.
One grower suggested that to speed the process, they could use drones to pull spore traps through the air above the field, and Quesada-Ocampo pursued that idea.
The trap in the drone works great because it can fly right over the crop canopy and sample large areas quickly, but there may be limitations.”
“But the turbulence that the drone has caused issues with the spore traps we were using,” Quesada-Ocampo says. “We didn’t realize that would happen because we weren’t engineers.”
Enter Xiang, who joined NC State’s Department of Biological and Agricultural Engineering as an assistant professor in 2022. As a Ph.D. student and postdoctoral researcher at Iowa State University, Xiang had studied agricultural robotics, artificial intelligence and machine vision.
Quesada-Ocampo and Xiang talked about ways to partner to take the cucurbit downy mildew project in new directions. Xiang initially designed a vacuum trap that hangs on a cable from the drone and sucks spores from the air.

While it worked better than the traditional stationary trap they’d been using, there were still problems. Spore trapping works best when it happens close to the plant canopy, not from far above, and drone flight restrictions can be an obstacle.
“The trap in the drone works great because it can fly right over the crop canopy and sample large areas quickly, but there may be limitations of using the drone itself in certain areas due to local regulations,” Quesada-Ocampo says.
She had another idea: hitching the vacuum trap to a robot. A robot on wheels wouldn’t work because it would get tangled in the cucumber vines.
But what about a spider-shaped robot?
Xiang had been working on a legged robot inspired by an insect, and she and her students Zhenghua Zhang and Weilong He got to work devising one that could carry the vacuum trap through cucumber fields without tripping on the vines.
Funding for the project has come from Pickle Packers International Inc., the NC State Chancellor’s Innovation Fund, the N.C. Biotechnology Center, the N.C. Plant Sciences Initiative and the N.C. Agricultural Foundation.
Hopes for the Project’s Future

The six-legged “spider” demonstrated at the Central Crops station is a prototype, Xiang explains, and work is underway to make it more practical for growers to use.
We’re trying to see if essentially this spider could diagnose onsite.
“Our next step is to use a camera to build three-dimensional models of its surroundings and use that for navigation. It’s going to be able to navigate in the field by itself without us having to manually control it,” Xiang says. “We’ll train a deep learning artificial intelligence model to tell, ‘Oh, this is a cucumber. Avoid this. But this soil is safe to step on.’”
Quesada-Ocampo has other ideas, as well.
“Right now, the vehicle would go out and sample, and we still need to take those samples back into the lab for processing,” she says. “But we want to be able to incorporate infield diagnostics, so we’re trying to see if essentially this spider could diagnose onsite.”
Looking ahead, Quesada-Ocampo and Xiang are also considering ways they could apply similar technology to battle other pathogens. One idea is to use the vacuum spore traps in sweetpotato packing houses, and another involves monitoring irrigation water for pathogens that can cause plant diseases.
In the end, they’ll consider their work a success if it helps keep cucumber farming sustainable in North Carolina and beyond.
“Because growers need to manage risk, some may apply fungicides weekly or biweekly to make sure everything’s OK. But that costs money,” Quesada-Ocampo says. “If we could reduce input costs for them and reduce disease losses for them at the same time, I would consider that a great success.”
- Categories:


